อุปกรณ์เสริมหุ่นยนต์หล่อ เป็นส่วนประกอบโลหะหลักที่ผลิตผ่านกระบวนการหล่อด้วยแรงดันสูง ตอบสนองความต้องการหลักของหุ่นยนต์อุตสาหกรรม รวมถึงความแม่นยำ ความเบา และความทนทาน แอปพลิเคชันและคุณสมบัติที่สำคัญมีดังนี้:
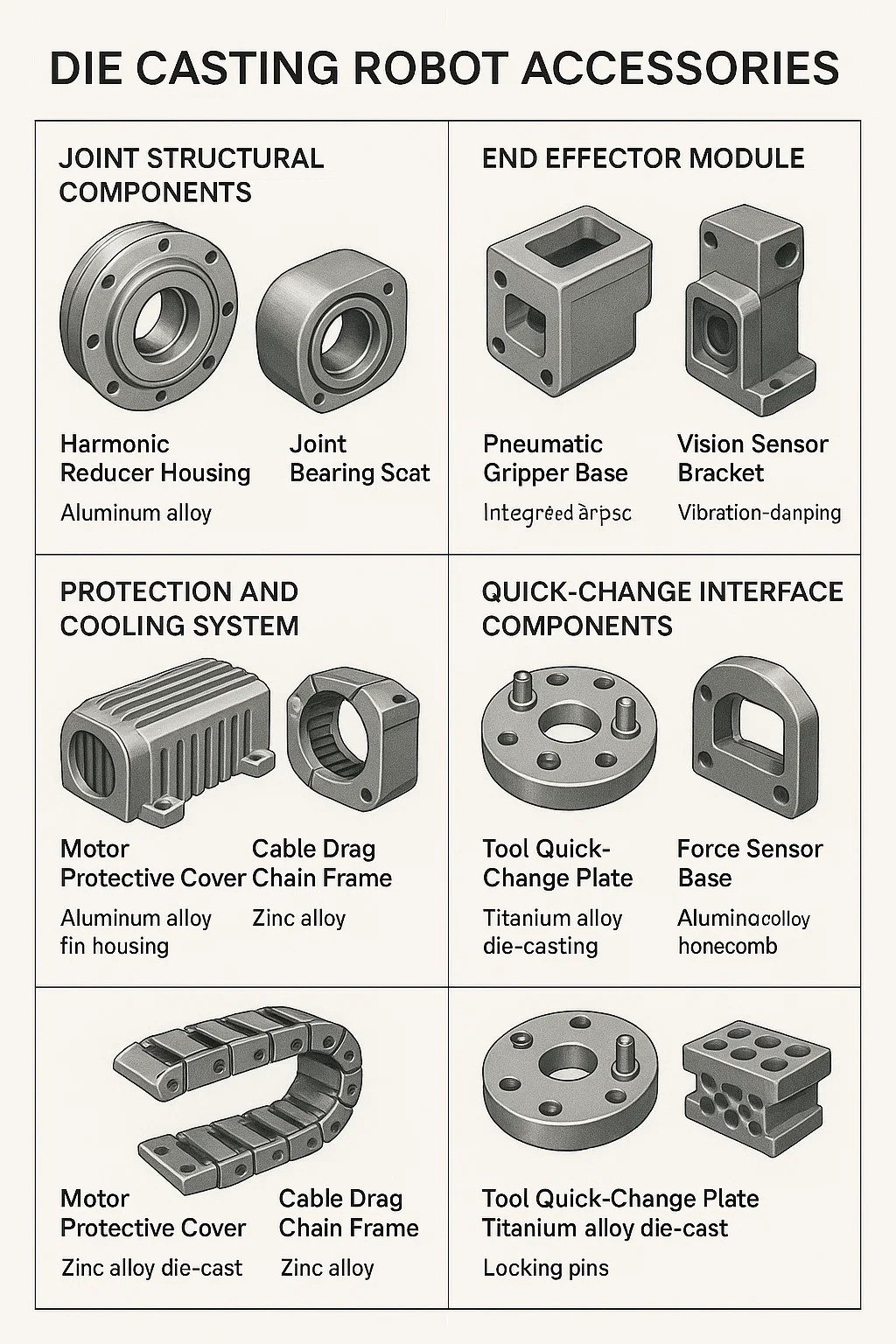
1. ส่วนประกอบโครงสร้างข้อต่อ - รากฐานสำคัญของความแม่นยำในการเคลื่อนไหว
ที่อยู่อาศัยลดฮาร์มอนิก:
การหล่อด้วยอลูมิเนียมอัลลอยด์มาแทนที่เหล็กกลึง โดยลดน้ำหนักลง 50% ในขณะที่ยังคงความคลาดเคลื่อนทางเรขาคณิตระดับไมครอน (รับประกันความสามารถในการทำซ้ำของแขนหุ่นยนต์ ±0.02 มม.)
ที่นั่งแบริ่งร่วม:
บูชหล่อลื่นตัวเองแบบหล่อโลหะผสมสังกะสีได้รับการขึ้นรูปแบบบูรณาการเพื่อขจัดการสึกหรอที่ผิดปกติที่เกิดจากข้อผิดพลาดในการประกอบ (การทำงาน 100,000 ชั่วโมงโดยไม่ต้องบำรุงรักษา)
2. โมดูล End Effector - ศูนย์กลางการรวมฟังก์ชัน
ฐานกริปเปอร์แบบนิวแมติก:
อลูมิเนียมหล่อขึ้นรูปพร้อมช่องอากาศภายในในตัว แทนที่ท่ออากาศภายนอก (สำหรับการเชื่อมฟิกซ์เจอร์บนสายการประกอบรถยนต์)
วงเล็บวิชันเซนเซอร์:
โครงสร้างลดแรงสั่นสะเทือนแบบหล่อด้วยแมกนีเซียมอัลลอยด์ ช่วยลดความเบลอของภาพที่เกิดจากการสั่นสะเทือนของแขนหุ่นยนต์ (สำหรับการตรวจสอบชิ้นส่วนอิเล็กทรอนิกส์ที่มีความแม่นยำ)
3. ระบบป้องกันและทำความเย็น
ฝาครอบป้องกันมอเตอร์:
โครงสร้างครีบโลหะผสมอะลูมิเนียมหล่อขึ้นรูป ให้การกระจายความร้อนของเซอร์โวมอเตอร์และการแยกเศษโลหะ (สำหรับหุ่นยนต์ขนถ่ายเครื่องมือเครื่องจักร CNC)
โครงโซ่ลากสายเคเบิล:
ตัวต่อโลหะผสมสังกะสีหล่อขึ้นรูป ให้ความทนทานต่อการสึกหรอมากกว่าพลาสติกวิศวกรรมถึงห้าเท่า และต้านทานการกัดกร่อนของน้ำมันไฮดรอลิก (สำหรับแขนหุ่นยนต์ในโรงงานปั๊มขึ้นรูป)
4. ส่วนประกอบอินเทอร์เฟซที่เปลี่ยนแปลงอย่างรวดเร็ว - แกนหลักของการผลิตที่ยืดหยุ่น
เครื่องมือจานเปลี่ยนด่วน:
หมุดล็อคแบบหล่อโลหะผสมไทเทเนียมที่มีตำแหน่งเรียว ทำให้มีความแม่นยำในการเชื่อมต่อซ้ำ ≤ 0.005 มม. (สำหรับการสลับระหว่างปืนเชื่อมและมือจับใน 10 วินาที)
ฐานเซ็นเซอร์แรง:
โครงสร้างรังผึ้งหล่อโลหะผสมอะลูมิเนียม ช่วยลดการรบกวนจากความเครียด (สำหรับการประกอบโมดูลป้อนกลับแรงบิดอย่างแม่นยำ)
5. อุปกรณ์เสริมแชสซีมือถือ
ศูนย์กลางไดรฟ์ AGV:
ซี่ล้อหล่อโลหะผสมแมกนีเซียม สามารถรับน้ำหนักไดนามิก 1 ตันในขณะที่ลดน้ำหนักลง 30% (เพิ่มความทนทานของหุ่นยนต์โลจิสติกส์ 2 ชั่วโมง)
ขายึด LiDAR:
ฐานกันหมาดโลหะผสมสังกะสีหล่อ กรองสัญญาณรบกวนจากการสั่นสะเทือนของพื้นดิน (สำหรับการเบี่ยงเบนเป็นศูนย์ในตำแหน่งการนำทาง AMR)